EBSILON®Professional Online Documentation



|
Line connections |
|
|
|
1 |
Signal in |
|
|
2 |
PID out |
|
|
3 |
Set Point |
|
|
4 |
Control inlet for Kp (as M), TN or Kl (as H) und TV or KD (as P) |
|
General User input values Results Characteristic lines Physics used Display shapes Example
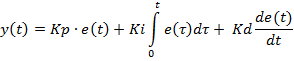
The task of this controller is to compensate a control difference (caused e.g. by the transfer behaviour of a transient component) in the case of transient processes. It cannot be applied as a data controller (“iteration controller“) like e.g. Component 12! By means of a correction variable, a chronologically variable actual value is calculated until it has reached the specified set point value. This is a matter of a control algorithm with P-, I and D-fractions and not of calculating a target value by means of a steady-state input variable! This type of controller uses the common differential equation to calculate the transfer function of PID-Controllers:
|
|
| Eqn. 1-1 |
Delivers the output signal y(t) with following parameters:
The integral part of the output signal y(t) can be obtained from the history of the input signals. The integrator is realized via summing the previous input signals e(t).
The differential time steps dt are replaced by the intervals of the sampling time Dt, which are given from the time series dialog in EBSILONprofessional.
Using this kind of discretisation eqn.1-1 changes to the following with regard to time step k:
|
|
| Eqn. 1-2 |
This type of controller requires a specification of the physical quantity to be controlled as well as of the input quantity. Correcting variable has to be one of the base quantities such as mass flow, enthalpy and pressure. Concerning input value derived ones are also possible, e.g. heat flow and temperature. Attention should be paid to set up the right characteristic of the controller:
All transient components that possess the flag FINIT can be commonly controlled via one global flag.
For this, the flag FINIT has been expanded by the position GLOBAL: 0.
If it is set to this value, the control of the transient simulation will be handed over to the global variable “Transient mode“, which can be found under
Extras \Model Options\Simulation\Transient\ Combo Box "Transient mode"
This will then pass on the desired mode (first iteration or following iteration) to the components. This can be controlled from the time series dialog by means of the expression “@calcoptions.sim.transientmode“.
For the PID controller, there is an additional logic line (Port 4) that can be switched on optionally. With its help, the controller parameters (Kp, KI, and KD) can be set externally. Here the data are taken over into the model in each iteration step. In connection with this, there is another flag FPARAMIN for selecting the source of the parameters.
Usually, the actual value of the target variable is unknown before the simulation, and it is only determined in the course of the iteration. On the other hand, the outlet signal of the controller (PIN 2) depends on the actual value and on its difference with respect to the reference variable respectively. This may lead to convergence problems. To alleviate this problem, the specification value FOUTUS has been implemented in Component 130.
The setting FOUTUS = 0 is the default setting. It is recommended to use the setting FOUTUS = 1 only if convergence cannot be achieved by other means.
|
FINIT |
Flag: Initializing state =0: Global, which is controlled via global variable "Transient mode" under Model Options: =1: First run (TCOUNT set to 0) |
|
FTYPE |
Switch specification of controller parameters =0: Specification of proportional gain factor and time constants Kp, Tn und Tv |
|
FSPIN |
Switch source of setpoint/input signal |
|
FPARAMIN |
Source of controller parameters =0: Internally Set |
|
FSPTYPE |
Switch for specification of the type of controller parameters |
|
FPIDOUT |
Switch for type of control variable |
|
SETPOINT |
Internal set point dependent on FSPSOURCE |
|
KP |
Proportional gain factor <0: Negative characteristic of controller >0: Positive characteristic of controller |
|
KI |
Integral gain factor, dependent on FTYPE, not active in case of FTYPE = 0 |
|
KD |
Differential gain factor, dependent on FTYPE, not active in case of FTYPE = 0 |
|
TN |
Reset time, dependent on FTYPE, not active in case of FTYPE = 1 |
|
TV |
Rate time, dependent on FTYPE, not active in case of FTYPE = 1 |
|
YINI |
Initial Value for output signal |
|
FPIDMODE |
Switch for controller algorithm =1: Difference equation |
|
FINTEGRAL |
Switch method of integration =1: Backward integration |
|
FYLIMIT |
Switch for controller limiting =0: no limitation |
| YMIN |
Minimal value of output signal |
|
YMAX |
Maximal value of output signal |
| TPRE |
Index of previous time step (if set to 0, all buffers are going to be initialized) |
| TIMEINT |
Total integration time |
| FOUTUS |
Corrected value usage (see under "General") =0: From current time step ( highest accuracy) |
| CLAG |
indicated value for integrator clamping (no input), active for FYLIMIT =3. If indicated value (CFLAG)= 1, then it indicates, that Clamping was active in the last time step. |
The output signal generally consists of three components (PID controller): Proportional, Integral, Differential. These components are output in the result values RPROP, RINT, RDIFF.
The sum of the individual components thus gives the value of the output signal. The unit of the values RPROP, RINT, RDIFF is identical to the unit of the output signal (e. g. for mass flow kg/s).
The result values RKP, RKI, RKD, on the other hand, are not components of the output signal, but the corresponding coefficients KP, KI, KD of equation 1-1 (see above). Accordingly, their unit always remains the same (regardless of the type of output signal FPIDOUT).
Z. For example, if FTYPE=0 - the values Tn, Tv, KP are used in the calculation - then the corresponding factors KP, KI, KD can be found in the result values RKP, RKI, RKD.
|
RKP |
Calculated proportional gain factor |
|
RKI |
Calculated integral gain factor |
|
RKD |
Calculated differential gain factor |
|
RTN |
Calculated reset time |
|
RTV |
Calculated rate time |
|
RPROP |
Actual proportional part of the controller output signal |
|
RINT |
Actual integral part of the controller output signal |
|
RDIFF |
Actual differential part of the controller output signal |
|
RTCURR |
Index of actual time step |
|
RTIMETOT |
Total time at end of calculation |
|
RCFLAG |
Status of integrator clamping |
These "characteristic" curves don´t give any specifications or correlations to characterize the component. They are necessary to just as memory for the signals.
Normally, there´s no need to set any values or give specifications, because the are transferred automatically by the time series calculations.
CCONTROLIN - History of input signal at line 1
This line stores the course of the input signal at line 1.
x-axis: Time steps, accumulated in seconds starting at Dt from first step.
y-axis: Values of input signals.
COUTPUT - History of output signal at line 2
This line stores the course of the output signal at line 2.
x-axis: Time steps, accumulated in seconds starting at Dt from first step.
y-axis: Values of output signals.
CINTEGRATOR - History of integral part of the output signal
This line stores the course of the integrator values representing the I-Part of the output signal at line 2.
x-axis: Time steps, accumulated in seconds starting at Dt from first step.
y-axis: Values of output signals.
CSETPOINT - History of set points (line 3 or internal)
This line stores the course of the set points.
x-axis: Time steps, accumulated in seconds starting at Dt from first step.
y-axis: Values of set points
RACONTROLIN - History of input signals at line 1
RAOUTPUT - History of output signals at line 2
RAINTEGRATOR - History of integral part of the output signal at line 2
RASETPOINT - History of set points (line 3 or internal)
The result arrays are correlated to the correspondent characteristic lines, all of them show the values at the end of the time step.
For calculation of the following time step the values of the result arrays are copied to the characteristic lines, what forms a kind of circular buffer.
With respect to users needs there are two algorithms to determine the numerical treatment of the controller equation eqn. 1-2.:
|
Difference equation |
||
|
|
||
|
Position algorithm |
||
|
with b0 = KP + KI*DT+KD/DT b1 = -KP-2KD/DT b2 = KD/DT |
||
|
Relationship of input parameters (based on the model of ideal PID-Controller) |
||
|
KD = KP*TV, and. TV=KD/KP |
||
All real controllers reach an almost physically determined limit of the quantity to be controlled. Either a lower or an upper limit will cut the range of possible output values governing the controlled system. For example at given conditions the output of a water tap can only vary between zero and max flow.
Hence, if there´s a remaining control deviation the integrator part can cause problems without being controlled (wind-up effects). In fact that means the integrator can end up with values, which take a long time to be balanced again.
To control the output signal, especially the integrators part of the signal various methods can be applied:
|
Saturation Feedback (FYLIMIT = 1) |
||
|
y(k) <= ymax && y(k) >= ymin y(k) = ymax, resp. ymin y(k-1) = (ylim - KP*e(k) - KD/DT*(e(k) -e(k-1)))/KI*DT |
||
This method compares the output signal to a given limiting value. While under- or overflow, the limit value will be set to the controller output and the integral part is fixed using feed back of a differential value, which simulates a zero input to the integrator. In this way the stored values remain active, but won´t cause any crossings of the thresholds.
|
Stop Integration (FYLIMIT = 2) |
||
|
y(k) = ymax, resp. ymin y(k-1) = const. (y(k-2)) |
||
This method stops the integration by setting it to a constant value, e.g. the value of the previous time step.
|
Clamp Integration (FYLIMIT = 3) |
||
|
Se(i) = ymax, resp. ymin |
||
This method clamps the integration to the given limits.
For the calculation of the summations in the controller equation three methods can be chosen:
|
Forward |
||
|
Se(i) = e(k) |
||
|
Backward |
||
|
Se(i) = e(k-1) |
||
|
Trapoidal |
||
|
Se(i) = 1/2*(e(k)+e(k-1)) |
||
 |
Form 1 |
Click here >> Component 130 Demo << to load an example.